

[ad_1]
Working with human and animal motions to instruct robots to dribble a ball, and simulated humanoid characters to have packing containers and engage in soccer

5 many years back, we took on the challenge of training a fully articulated humanoid character to traverse obstacle programs. This shown what reinforcement understanding (RL) can achieve as a result of trial-and-error but also highlighted two challenges in solving embodied intelligence:
- Reusing beforehand learned behaviours: A considerable sum of info was essential for the agent to “get off the ground”. With no any preliminary expertise of what power to implement to every of its joints, the agent began with random physique twitching and speedily falling to the ground. This difficulty could be alleviated by reusing previously learned behaviours.
- Idiosyncratic behaviours: When the agent eventually discovered to navigate obstacle courses, it did so with unnatural (albeit amusing) motion designs that would be impractical for purposes this sort of as robotics.
Listed here, we explain a solution to both of those challenges referred to as neural probabilistic motor primitives (NPMP), involving guided mastering with movement patterns derived from individuals and animals, and explore how this technique is made use of in our Humanoid Football paper, published now in Science Robotics.
We also focus on how this identical tactic allows humanoid entire-physique manipulation from eyesight, these as a humanoid carrying an object, and robotic manage in the real-globe, such as a robot dribbling a ball.
Distilling details into controllable motor primitives utilizing NPMP
An NPMP is a normal-function motor handle module that interprets short-horizon motor intentions to reduced-level manage alerts, and it is experienced offline or via RL by imitating movement capture (MoCap) knowledge, recorded with trackers on humans or animals undertaking motions of interest.
The product has two elements:
- An encoder that normally takes a potential trajectory and compresses it into a motor intention.
- A minimal-stage controller that generates the next motion provided the current point out of the agent and this motor intention.
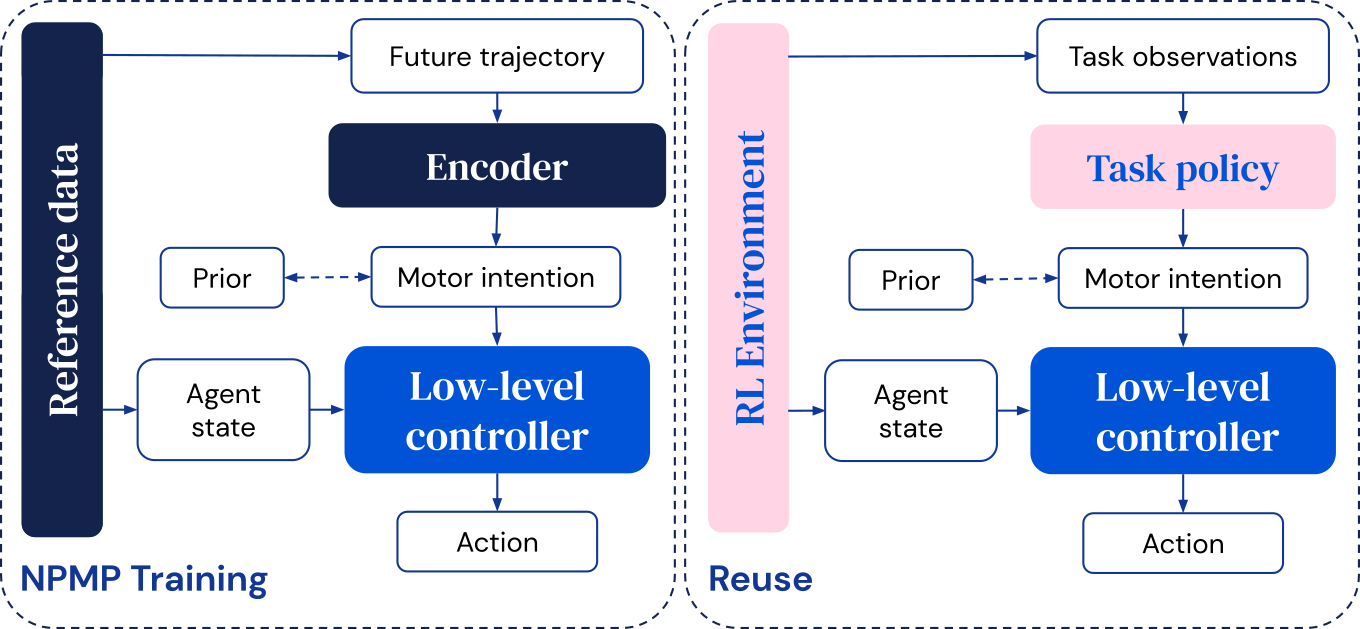
Soon after schooling, the reduced-degree controller can be reused to master new jobs, in which a substantial-amount controller is optimised to output motor intentions immediately. This enables productive exploration – given that coherent behaviours are made, even with randomly sampled motor intentions – and constrains the remaining solution.
Emergent workforce coordination in humanoid football
Football has been a long-standing obstacle for embodied intelligence investigate, demanding unique skills and coordinated staff perform. In our most recent work, we utilised an NPMP as a prior to information the mastering of movement capabilities.
The outcome was a team of gamers which progressed from finding out ball-chasing expertise, to finally understanding to coordinate. Formerly, in a research with uncomplicated embodiments, we had revealed that coordinated conduct can emerge in groups competing with each other. The NPMP authorized us to notice a equivalent influence but in a state of affairs that necessary substantially much more sophisticated motor handle.
Our agents obtained competencies which includes agile locomotion, passing, and division of labour as shown by a range of data, which include metrics utilized in serious-planet sporting activities analytics. The players exhibit each agile substantial-frequency motor regulate and extended-term decision-making that entails anticipation of teammates’ behaviours, primary to coordinated workforce engage in.
Full-entire body manipulation and cognitive responsibilities employing vision
Mastering to interact with objects utilizing the arms is one more challenging handle obstacle. The NPMP can also permit this kind of full-overall body manipulation. With a compact total of MoCap information of interacting with packing containers, we’re capable to prepare an agent to have a box from one particular area to an additional, utilizing selfish vision and with only a sparse reward sign:
In the same way, we can train the agent to catch and toss balls:
Making use of NPMP, we can also deal with maze responsibilities involving locomotion, perception and memory:
Secure and effective handle of true-environment robots
The NPMP can also assistance to handle serious robots. Obtaining properly-regularised behaviour is significant for activities like walking more than rough terrain or dealing with fragile objects. Jittery motions can problems the robot by itself or its surroundings, or at least drain its battery. As a result, considerable exertion is typically invested into coming up with finding out aims that make a robotic do what we want it to even though behaving in a safe and productive method.
As an alternative, we investigated irrespective of whether making use of priors derived from biological motion can give us effectively-regularised, all-natural-wanting, and reusable motion skills for legged robots, this kind of as walking, managing, and turning that are suitable for deploying on real-environment robots.
Beginning with MoCap info from individuals and pet dogs, we tailored the NPMP strategy to teach abilities and controllers in simulation that can then be deployed on true humanoid (OP3) and quadruped (ANYmal B) robots, respectively. This allowed the robots to be steered about by a person by using a joystick or dribble a ball to a concentrate on site in a normal-looking and sturdy way.
Gains of applying neural probabilistic motor primitives
In summary, we have utilized the NPMP skill design to find out complicated responsibilities with humanoid figures in simulation and true-entire world robots. The NPMP offers small-level movement abilities in a reusable trend, building it less complicated to discover handy behaviours that would be complicated to learn by unstructured trial and error. Employing motion seize as a supply of prior information, it biases finding out of motor command toward that of naturalistic movements.
The NPMP enables embodied agents to understand additional swiftly making use of RL to learn much more naturalistic behaviours to understand additional protected, productive and steady behaviours ideal for genuine-planet robotics and to combine complete-physique motor regulate with for a longer time horizon cognitive capabilities, this kind of as teamwork and coordination.
Find out much more about our get the job done:
[ad_2]
Source backlink