
[ad_1]
In Oct 2021, we announced that we obtained the MuJoCo physics simulator, and made it freely offered for all people to assist exploration in all places. We also dedicated to developing and protecting MuJoCo as a cost-free, open-resource, community-pushed venture with very best-in-class abilities. Today, we’re thrilled to report that open sourcing is finish and the entire codebase is on GitHub!
Below, we demonstrate why MuJoCo is a terrific system for open up-resource collaboration and share a preview of our roadmap likely ahead.
A platform for collaboration
Physics simulators are critical applications in contemporary robotics analysis and often fall into these two groups:
- Closed-resource, professional computer software.
- Open up-source program, usually developed in academia.
The 1st group is opaque to the consumer, and while at times totally free to use, are not able to be modified and is really hard to recognize. The second category frequently has a scaled-down person base and suffers when its builders and maintainers graduate.
MuJoCo is a single of the handful of total-highlighted simulators backed by an established organization, which is genuinely open supply. As a research-pushed organisation, we perspective MuJoCo as a system for collaboration, where roboticists and engineers can join us to build a single of the world’s very best robotic simulators.
Characteristics that make MuJoCo particularly desirable for collaboration are:
- Complete-highlighted simulator that can model advanced mechanisms.
- Readable, performant, moveable code.
- Simply extensible codebase.
- Detailed documentation: each consumer-struggling with and code opinions.
We hope that colleagues across academia and the OSS local community benefit from this system and contribute to the codebase, strengthening investigate for all people.
Effectiveness
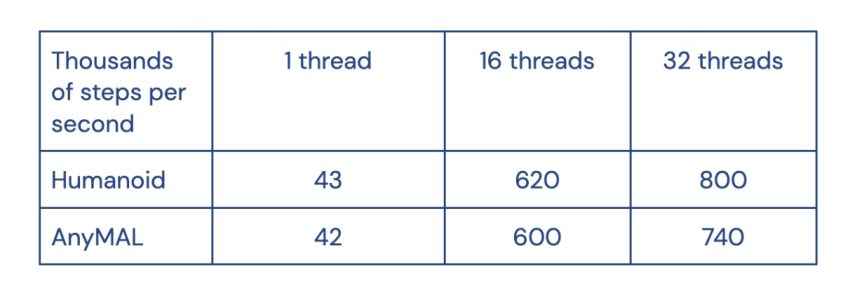
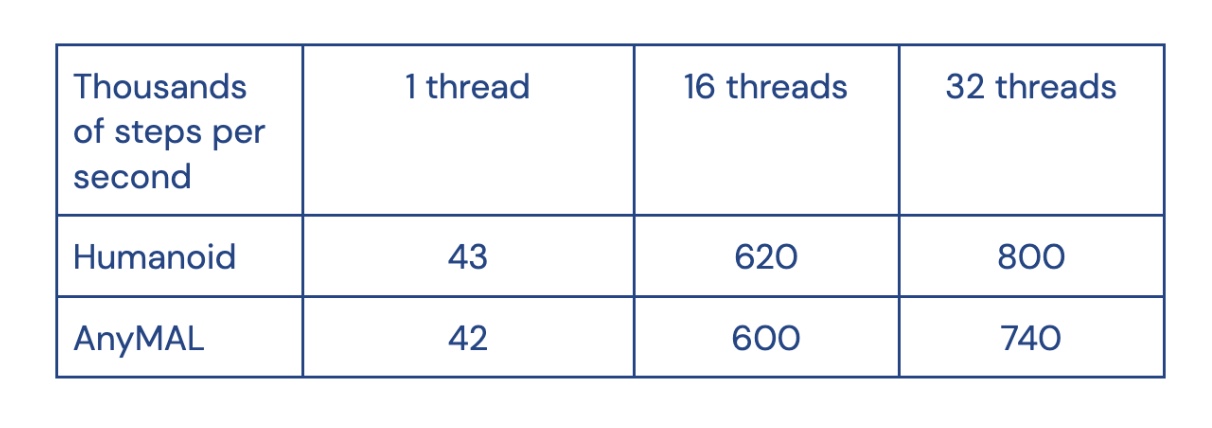
As a C library with no dynamic memory allocation, MuJoCo is very quick. However, raw physics velocity has historically been hindered by Python wrappers, which made batched, multi-threaded operations non-performant due to the presence of the World Interpreter Lock (GIL) and non-compiled code. In our roadmap below, we tackle this problem heading ahead.
For now, we’d like to share some benchmarking success for two frequent types. The success ended up obtained on a conventional AMD Ryzen 9 5950X machine, working Home windows 10.
Roadmap
Here’s our close to-phrase roadmap for MuJoCo:
- Unlock MuJoCo’s speed probable with batched, multi-threaded simulation.
- Support much larger scenes with enhancements to inner memory administration.
- New incremental compiler with greater model composability.
- Help for better rendering via Unity integration.
- Indigenous assist for physics derivatives, both equally analytical and finite-differenced.
Master far more
Useful methods about MuJoCo:
We search forward to obtaining your contributions!
[ad_2]
Supply link